|
|
FEATool Multiphysics
v1.18.1
Finite Element Analysis Toolbox
|
|
|
FEATool Multiphysics
v1.18.1
Finite Element Analysis Toolbox
|
A selection of tutorial models and examples are presented in this section. These and other model examples can also be selected and automatically run from the File > Model Examples and Tutorials... menu.
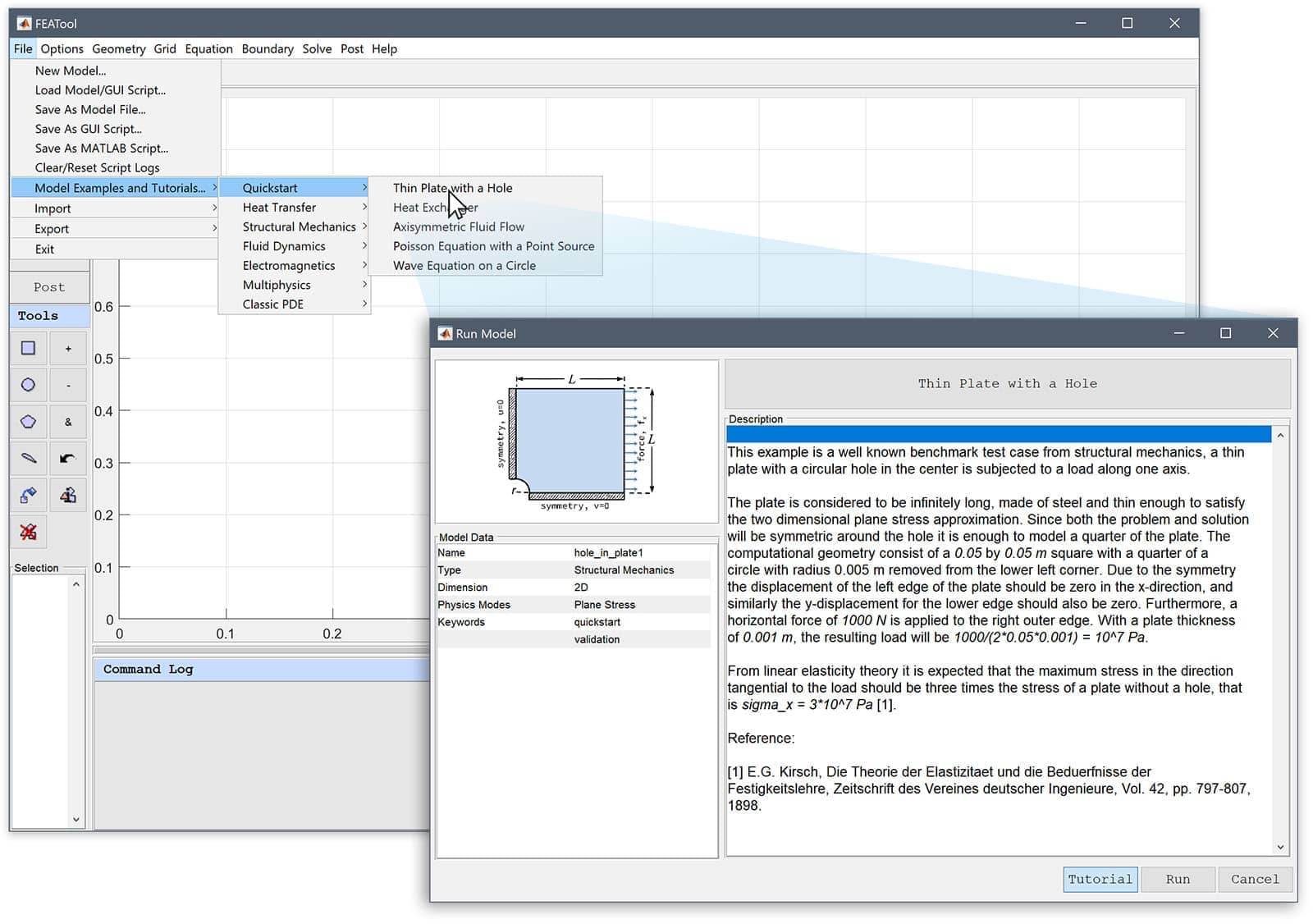
When an automated tutorial is selected, the Run Model dialog box will open and show a description and information about the tutorial example. The tutorial can be started by pressing the Run button. de-selecting the Tutorial mode toggle button will run the tutorial in fast automatic mode without any pauses. When a tutorial or finite element script (fes) model is run, the GUI Playback Control panel below is opened where the Playback Speed can be controlled via the slider. Setting the slider to the slowest (far left) setting pauses the tutorial playback and enables the Step button to manually step through the tutorial at ones own pace. Closing the playback control panel or pressing the Cancel button stops the tutorial at the current state.
Transient Heat Diffusion in a Rod
Heat Transfer in a Ceramic Strip
Space-Time Transformation of Heat Conduction
Heat Conduction with Tabulated Thermal Conductivity
Cooling Analysis of a Battery Pack Module
Natural Convection in a Square Cavity
Resistive Heating in a Tungsten Filament
Heat Induced Stress in a Brake Disc
Thermo-Mechanical Bending of a Beam
Flow Over a Backwards Facing Step
Potential Flow Over an Airfoil
Supersonic Flow Over an Obstacle
Turbulent Flow Over a Backwards Facing Step (OpenFOAM)
Non-Newtonian Flow in an Extrusion Die
Supersonic Turbulent Flow Past a Prism
Natural Convection in a Square Cavity
Fluid-Structure Interaction - Elastic Beam
Vibration Modes of a Hollow Cylinder
Stress Analysis of a Thick Plate
Temperature Loading of a Tapered Cylinder
Heat Induced Stress in a Brake Disc
Piezoelectric Bending of a Beam
Stress Distribution in a Solenoid
Thermo-Mechanical Bending of a Beam
Fluid-Structure Interaction - Elastic Beam
Electrostatic Spherical Capacitor
Magnetic Field Around a Horseshoe Magnet
Two Material Wave Guide Interface
Capacitance in a Microstrip Transmission Line
Skin Effect in a Circular Wire
Piezoelectric Bending of a Beam
Stress Distribution in a Solenoid
Resistive Heating in a Tungsten Filament
Heat Induced Stress in a Brake Disc
Natural Convection in a Square Cavity
Piezoelectric Bending of a Beam
Thermo-Mechanical Bending of a Beam
Fluid-Structure Interaction - Elastic Beam
Stress Distribution in a Solenoid
Multi-Simulation Heat Exchanger
Poisson Equation with a Point Source
Vibrations of a Circular Membrane
Resonance Frequencies of a Room
The following selection of MATLAB m-file script examples and test cases can be found in the examples directory of the FEATool installation folder.
| Field | Description |
|---|---|
| ex_axistressstrain1 | Axisymmetric stress-strain of a hollow cylinder. |
| ex_axistressstrain2 | Axisymmetric stress-strain of a hollow sphere. |
| ex_axistressstrain3 | Axisymmetric disc with fixed edge and point load. |
| ex_axistressstrain4 | Stress formed in brake disk due to heat build up. |
| ex_axistressstrain5 | Axisymmetric vibration modes of a hollow cylinder. |
| ex_brinkman1 | Coupled porous and incompressible laminar flow. |
| ex_classicpde1 | Eigenmodes for a circular drum. |
| ex_classicpde2 | Eigenmodes for a L-shaped membrane. |
| ex_compressibleeuler1 | 1D compressible Euler SOD shock tube problem. |
| ex_compressibleeuler2 | 2D compressible Euler oblique shock problem. |
| ex_compressibleeuler3 | 2D compressible Euler reflected shock problem. |
| ex_compressibleeuler4 | 2D compressible Euler inviscid supersonic flow over a bump. |
| ex_compressibleeuler5 | 3D compressible Euler inviscid supersonic flow over a bump. |
| ex_compressibleeuler6 | 2D supersonic flow past a wedge with an oblique shock wave. |
| ex_convdiff1 | Convection and diffusion on a unit square. |
| ex_convdiff2 | Periodic convection and diffusion on a line with exact solution. |
| ex_convdiff3 | Infinite time dependent convection and diffusion on a line. |
| ex_convdiff4 | One dimensional Burgers equation with steady solution. |
| ex_convdiff5 | Dominating convection example requiring artificial stabilization. |
| ex_convdiff6 | 1D stationary convection-diffusion-reaction with exact solution. |
| ex_convreact1 | Time dependent one dimensional convection and reaction model. |
| ex_custom_equation1 | Black-Scholes model equation implemented as a custom equation. |
| ex_darcy1 | Porous media flow in a packed bed reactor using Darcy's law. |
| ex_diffusion1 | Diffusion equation on a unit square with different solutions. |
| ex_diffusion2 | Diffusion equation on a line with exact solutions. |
| ex_eddycurrents1 | 2D Eddy currents test problem solved vector (Nedelec) elements. |
| ex_eddycurrents2 | 3D Eddy currents test problem solved vector (Nedelec) elements. |
| ex_electrostatics1 | Electrostatics test problem. |
| ex_electrostatics2 | Axisymmetric model of a spherical capacitor. |
| ex_acconduction1 | Calculate dielectric loss in a plane capacitor with AC current. |
| ex_euler_beam1 | 1D Euler-Bernoulli beam example. |
| ex_euler_beam2 | 1D Euler-Bernoulli beam vibration mode example. |
| ex_euler_beam3 | 1D Euler-Bernoulli beam vibration example. |
| ex_euler_beam4 | 1D beam example with point load and simple supported edges. |
| ex_fluidstructure1 | Fluid-structure interaction for static flow past an elastic beam |
| ex_fluidstructure2 | Fluid-solid interaction, instationary flow past an elastic beam |
| ex_fluidstructure3 | 2D Fluid-structure interaction for flow past an elastic beam |
| ex_fluidstructure4 | 3D Fluid-structure interaction for flow past an elastic beam |
| ex_heat_exchanger1 | Free and forced convection in a heat exchanger. |
| ex_heat_exchanger2 | Multi-Simulation heat exchanger. |
| ex_heattransfer1 | 2D heat conduction with natural convection and radiation. |
| ex_heattransfer2 | One dimensional stationary heat transfer with radiation. |
| ex_heattransfer3 | One dimensional transient heat conduction. |
| ex_heattransfer4 | Two dimensional heat transfer with convective cooling. |
| ex_heattransfer5 | Two dimensional transient cooling shrink fitting example. |
| ex_heattransfer6 | Axisymmetric steady state heat conduction of a cylinder. |
| ex_heattransfer7 | One dimensional transient heat conduction with analytic solution. |
| ex_heattransfer8 | 2D space-time formulation of one dimensional transient heat diffusion. |
| ex_heattransfer9 | One dimensional transient heat conduction with point source. |
| ex_heattransfer10 | Conjugate heat transfer test example with multiple domains. |
| ex_heattransfer11 | Design optimization for cooling with target temperature. |
| ex_laplace1 | Laplace equation on a unit square. |
| ex_laplace2 | Laplace equation on a unit circle. |
| ex_linearelasticity1 | Linear elasticity test case, solid stress-strain for a cube. |
| ex_linearelasticity2 | Three dimensional example of stress on a bracket. |
| ex_linearelasticity3 | Parametric study of the bracket deformation model. |
| ex_linearelasticity4 | Stress of loaded I-beam supported by two brackets. |
| ex_linearelasticity5 | Vibration of a square plate. |
| ex_linearelasticity6 | NAFEMS benchmark LE6, skew plate under normal pressure. |
| ex_magnetostatics1 | Magnetostatics test problem. |
| ex_magnetostatics2 | Magnet field around a horseshoe magnet. |
| ex_magnetostatics3 | Cylindrical magnet without electrical currents. |
| ex_magnetostatics4 | Axisymmetric model of cylindrical magnet. |
| ex_magnetostatics5 | 2D Magnetostatics test model. |
| ex_multiphase1 | Multiphase flow example of a static bubble. |
| ex_multiphase2 | Multiphase flow example of a rising bubble. |
| ex_multiphase3 | Multiphase flow example of a breaking dam. |
| ex_natural_convection | Natural convection in a square cavity. |
| ex_navierstokes1 | Incompressible fluid flow in a channel. |
| ex_navierstokes2 | Incompressible driven cavity flow. |
| ex_navierstokes3 | Incompressible fluid flow around a cylinder in a channel (Re=20). |
| ex_navierstokes3b | Flow around a cylinder solver benchmark. |
| ex_navierstokes4 | Incompressible fluid flow over a backwards facing step. |
| ex_navierstokes5 | Two dimensional decay of a standing vortex. |
| ex_navierstokes6 | Time dependent flow around a cylinder in a channel (0<=Re<=100). |
| ex_navierstokes7 | Laminar flow in a curved three dimensional pipe. |
| ex_navierstokes8 | Axisymmetric flow in a in constricted circular pipe. |
| ex_navierstokes8b | Axisymmetric pipe flow solver benchmark. |
| ex_navierstokes9 | Axisymmetric impinging jet. |
| ex_navierstokes10 | 3D flow in a pipe using the OpenFOAM solver. |
| ex_navierstokes11 | 3D cavity flow in a cube using the OpenFOAM solver. |
| ex_navierstokes12 | 3D flow over a backwards facing step using the OpenFOAM solver. |
| ex_navierstokes13 | 3D flow past a cylinder using the OpenFOAM solver. |
| ex_navierstokes14 | Axisymmetric flow in a pipe due to pressure difference. |
| ex_navierstokes15 | 2D channel flow due to periodic pressure gradient. |
| ex_navierstokes16 | 2D flow past a cylinder with an attached fixed beam. |
| ex_navierstokes17 | Turbulent 2D flow in a channel. |
| ex_nonnewtonian1 | 2D non-Newtonian power-law flow in a channel. |
| ex_nonlinear_pde1 | 1D nonlinear PDE with analytical solution. |
| ex_nonlinear_pde2 | 1D nonlinear PDE with analytical solution extended to 2D. |
| ex_periodic1 | Moving 1D pulse in a periodic domain. |
| ex_periodic2 | 2D Periodic Poisson equation example. |
| ex_piezoelectric1 | Bending of a beam due to piezoelectric effects. |
| ex_planestrain1 | 2D Plane strain analysis of a pressure vessel. |
| ex_planestrain2 | Plane strain analysis of a pressure vessel. |
| ex_planestress1 | Stress computation for a hole in a thin plate. |
| ex_planestress2 | NAFEMS plane stress benchmark example. |
| ex_planestress3 | NAFEMS benchmarks IC1-4, plane stress analysis of a tapered plate. |
| ex_planestress4 | NAFEMS benchmark T1, plate deformation due to thermal stress. |
| ex_planestress5 | NAFEMS benchmark LE1, plane stress in an elliptic membrane. |
| ex_planestress6 | 2D Plane stress analysis of a pressure vessel. |
| ex_planestress7 | Thermally induced displacements on a rectangle. |
| ex_poisson1 | Poisson equation on a line. |
| ex_poisson2 | Poisson equation on a circle. |
| ex_poisson3 | Poisson equation on a unit square. |
| ex_poisson4 | Poisson equation on a rectangle with complex solution. |
| ex_poisson5 | Poisson equation on a sphere. |
| ex_poisson6 | Poisson equation on a unit cube. |
| ex_poisson7 | Poisson equation on a unit circle with a point constraint. |
| ex_poisson8 | Poisson equation on a unit square with all Neumann boundary conditions and integral constraint. |
| ex_potential_flow1 | Potential flow around a NACA wing profile. |
| ex_resistive_heating1 | Resistive heating of a spiral tungsten filament. |
| ex_resistive_heating2 | Nonlinear resistive heating in a conducting plate. |
| ex_robinbc1 | 1D example with a Robin boundary condition. |
| ex_spanner | Gmsh import of a mesh and stress calculation in a spanner. |
| ex_swirl_flow1 | 2D axisymmetric swirl flow in a tube with analytic solution. |
| ex_swirl_flow2 | 2D axisymmetric swirl flow in a stepped narrowing tubular region. |
| ex_swirl_flow3 | 2D axisymmetric time dependent Taylor-Couette swirl flow. |
| ex_swirl_flow4 | 2D axisymmetric swirl flow around a rotating disk. |
| ex_waveequation1 | Wave equation on a unit circle. |
| ex_schrodinger1 | The Schrödinger equation for a Hydrogen atom. |